Branesh M. Pillai, Chumpon Wilasrusmee, Jackrit Suthakorn
This study introduces a robotic system for laparoscopic surgical tool insertion,
incorporating observer-based dynamic and robot-assisted bilateral control. The
system, validated using the MU-LapaRobot, features a virtual spring
damper force lock to enhance precision and safety during surgery. Experimental
results showed low force and position errors, confirming the algorithm’s
effectiveness in improving surgical accuracy and minimizing excessive force.
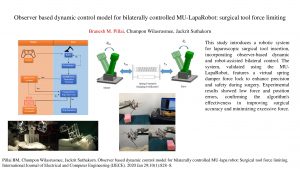
Pillai BM, Chumpon Wilasrusmee, Jackrit Suthakorn. Observer based dynamic control model for bilaterally controlled MU-lapa robot: Surgical tool force limiting.
International Journal of Electrical and Computer Engineering (IJECE). 2020 Jan 29;10(1):828–8.