Highlighted Research
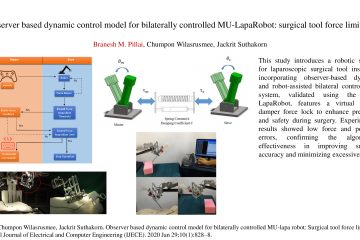
Observer based dynamic control model for bilaterally controlled MU-LapaRobot: surgical tool force limiting
Branesh M. Pillai, Chumpon Wilasrusmee, Jackrit Suthakorn This study introduces a robotic system for laparoscopic surgical tool insertion, incorporating observer-based dynamic and robot-assisted bilateral control. The system, validated using the MU-LapaRobot, features a virtual spring damper force lock to enhance precision and safety during surgery. Experimental results showed low force Read more…